Bu uygulamada I2C haberleşme protokolünü destekleyen MPU-6050 IMU kartının üzerinde bulunan sensörlerle sıcaklık ivme ve cayro değerlerini ölçeceğiz. Bu sensörler yerine aynı görevi yapan farklı sensörler de kullanabilirsiniz. Öncelikle kullanacağınız sensörün datasheet'ini yani belirtimini okuyarak sensörün I2C adresini ve veri isteme şeklini öğrenmelisiniz.
Bu projede kullanacağımız kart, çeşitli görevler için özelleştirilmiş bir IMU kartıdır. IMU ivme, basınç, cayro gibi sensörleri üzerinde bulunduran sensör kartıdır. MPU-6050 elektronik ve robot malzemeleri satan yerlerde kolayca bulunabilir. Ucuz olması ve kolay kullanımından dolayı bu kart seçilmiştir.
MPU-6050'nin belirtimi (datasheet) incelendiğinde görüldüğü gibi, cihazın I2C haberleşme adresi 0x68'dir. Buradan sensörler hakkında daha fazla bilgi de edilinebilir.
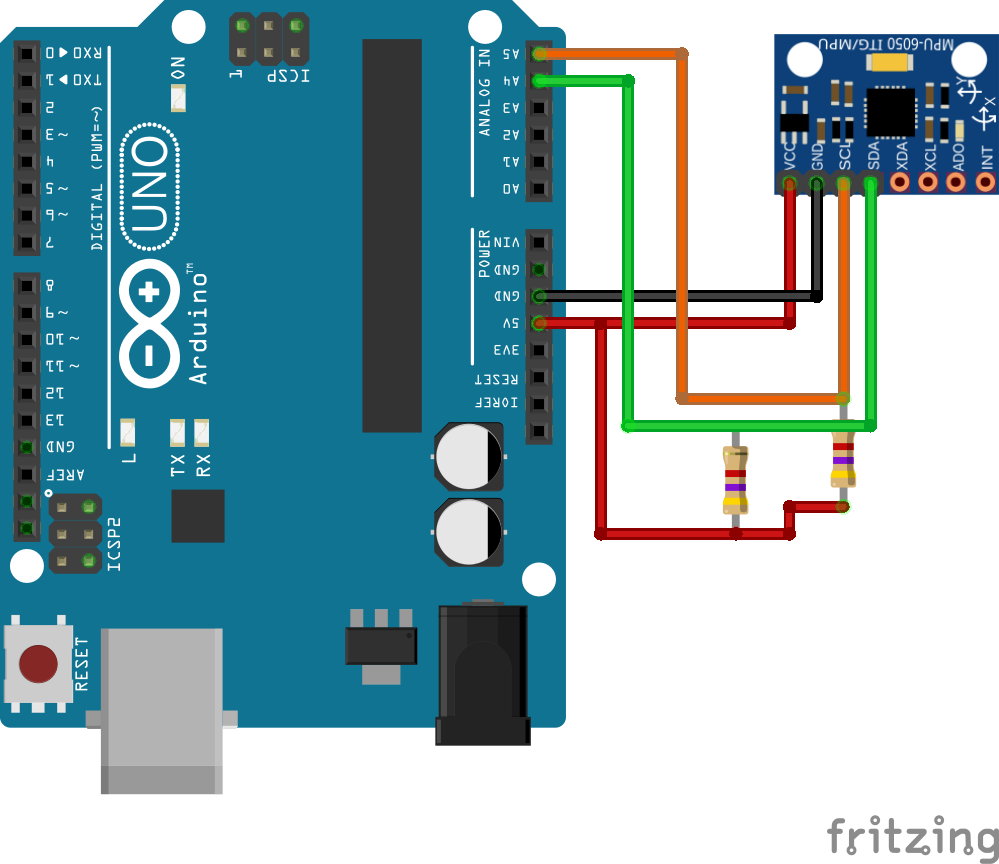
Bu uygulamayı yapmak için ihtiyacımız olan malzemeler:
- 1 x Arduino
- 2 x 4.7K ohm direnç
- 1 x MPU-6050
Slave görevindeki Arduino kodu
/* MPU-6050 ile I2C haberleşme örneği */
#include<Wire.h>
/*
* I2C fonksiyonlarını kullanabilmek için
* Wire.h kütüphanesini projemize ekledik
*/
const int MPU=0x68;
/* MPU-6050'nin I2C haberleşme adresi */
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
/* IMU'dan alınacak değerlerin kaydedileceği değişkenler */
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0); /* MPU-6050 çalıştırıldı */
Wire.endTransmission(true);
/* I2C haberleşmesi başlatıldı ve MPU-6050'nin ilk ayarları yapıldı */
Serial.begin(9600);
}
void loop(){
verileriOku();
/* IMU'dan değerler okundu */
/* Okunan değerler serial monitör'e yazdırılıyor */
Serial.print("ivmeX = "); Serial.print(AcX);
Serial.print(" | ivmeY = "); Serial.print(AcY);
Serial.print(" | ivmeZ = "); Serial.print(AcZ);
Serial.print(" | Sicaklik = "); Serial.print(Tmp/340.00+36.53);
/* Datasheetten alınan sıcaklık hesaplama formülü kullanıldı */
Serial.print(" | GyroX = "); Serial.print(GyX);
Serial.print(" | GyroY = "); Serial.print(GyY);
Serial.print(" | GyroZ = "); Serial.println(GyZ);
delay(333);
}
void verileriOku(){
Wire.beginTransmission(MPU);
/* I2C haberleşmesi yapılacak kart seçildi */
Wire.write(0x3B);
/* 0x3B adresindeki register'a ulaşıldı */
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true);
/* 14 BYTE'lık veri istendi */
AcX=Wire.read()<<8|Wire.read();
AcY=Wire.read()<<8|Wire.read();
AcZ=Wire.read()<<8|Wire.read();
Tmp=Wire.read()<<8|Wire.read();
GyX=Wire.read()<<8|Wire.read();
GyY=Wire.read()<<8|Wire.read();
GyZ=Wire.read()<<8|Wire.read();
/*
* Sırası ile okunan her iki byte birleştirilerek sırası ile değişkenlere yazdırıldı
* Böylece IMU'dan tüm değerler okunmuş oldu
* 0X3B adresi imu değerlerinden ilk sensörün değerine denk gelmektedir.
* IMU'dan tüm değerlerin okunabilmesi için bu adresten başlandı
*/
}
Böylece I2C ile sensörlerden nasıl veri alacağımızı, iki Arduino'yu nasıl konuşturacağımızı öğrendik. I2C, birden fazla sensörün kullanıldığı devrelerde, sensörlerin ve Arduino'nun birbirinden fazla uzakta bulunmadığı projelerde sıklıkla kullanılır.
Hiç yorum yok:
Yorum Gönder