SPI kütüphanesi, Arduino'nun her zaman master konumunda olacağı düşünülerek hazırlanmış fakat bu uygulamamızda kullanacağımız Arduino'lardan birisi master, diğeri ise slave (köle) durumunda çalışacak. Master olan Arduino için SPI kütüphanesi yeterli olacak fakat diğer Arduino için kütüphane dışında kendi komutlarımızı yazmamız gerekir.
Uygulamada master görevindeki Arduino, diğer Arduino'ya bağlı LED'lerin konumunu yollayacağı veriler ile değiştirecek. Slave görevindeki Arduino LED'in konumunu değiştirdikten sonra, SPI üzerinden kaç kere veri geldiğini master olan Arduino'ya geri bildirecek.
Bu uygulamayı yapmak için ihtiyacımız olan malzemeler;
- 2 x Arduino
- 1 x LED
- 1 x 220 ohm direnç
- 1 x Breadboard
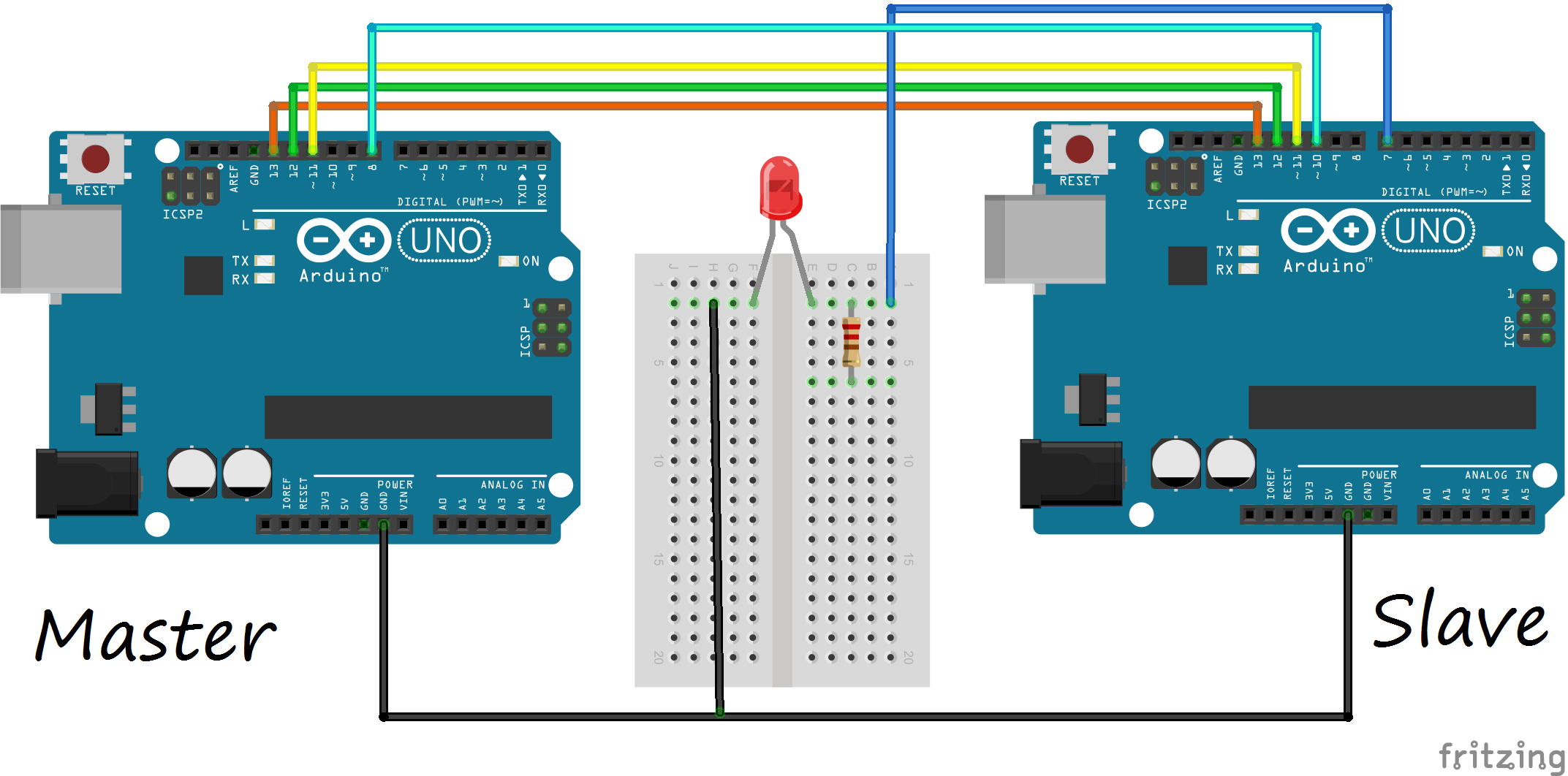
Master Arduino'nun 11, 12 ve 13. pinleri, köle görevindeki Arduino'nun sırası ile 11, 12 ve 13. pinlerine takıldı. Master görevindeki Arduino'nun 8. pini, SS pini olarak belirlendi ve köle görevindeki Arduino'nun 10. pinine bağlandı.
Dikkat: Devredeki iki Arduino da ayrı ayrı veya aynı besleme kaynağından beslenmelidir. Eğer Arduino'lar ayrı kaynaklardan besleniyorsa toprak hatlarının birleştirilmesi gerektiğini unutmayın. Köle üzerinden gelen mesajları okumak için master görevindeki Arduino'yu bilgisayara bağlayarak Seri Monitörü açınız.
/* SPI haberleşmesinde Master olarak görev yapan Arduino kodu */
#include <SPI.h>
/*
* SPI fonksiyonlarını kullanabilmek için
* SPI.h kütüphanesini projemize ekledik
*/
const int SSpini = 8;
/* Slave görevindeki Arduino'nun seçilmesi için 8 bumaralı pin SS olarak belirlendi */
void setup()
{
pinMode(SSpini, OUTPUT);
/* SS pini çıkış olarak ayarlandı */
digitalWrite(SSpini, HIGH);
/* Slave olan Arduino başlangıçta haberleşmeye geçmemesi için SS pini HIGH yapıldı */
SPI.begin();
/* SPI haberleşmesi başlatıldı */
}
void loop()
{
veriGonder('a', SSpini);
/* Diğer arduinoya LED'i yakması için 'a' komutu yollandı */
delay(1000);
veriGonder('b', SSpini);
/* Diğer arduinoya LED'i söndürmesi için 'b' komutu yollandı */
delay(1000);
}
/* SPI üzerinden veri göndermek için yazılmış fonksiyondur */
void veriGonder(char veri, int SSpini)
{
digitalWrite(SSpini, LOW);
/* Diğer Arduino'nun veri dinlemeye başlaması için SS hattını LOW düzeyine çekmeliyiz */
delay(1);
/* Kısa bir süre bekleyelim */
char LEDDurumu;
LEDDurumu = SPI.transfer(veri);
Serial.println(LEDDurumu);
/* veri karakteri diğer Arduino'ya yollandı
* Fonksiyon diğer arduino'dan gelen veriyi vermektedir
* Geri gelen veri LEDDurumu değişkeninde tutulmuştur
* Bu değişken Seri port üzerinden bilgisayardaki Serial monitöre yollanmıştır
*/
digitalWrite(SSpini, HIGH);
/* Haberleşmeyi bitirmek için pin LOW konumuna çekilmiştir */
}
Öncelikle projeye SPI fonksiyonlarının kullanılabilmesi için "SPI.h" kütüphanesi eklendi. ‘SSpini' değişkeniyle, seçilecek olan köle konumlu Arduino belirlendi. Bu değişken çoğaltılarak sisteme daha fazla köle görevli Arduino eklenebilir. Setup fonksiyonu içinde SS pinleri çıkış olarak ayarlandı ve ‘HIGH' konumuna getirildi. Daha sonra SPI.begin() fonksiyonuyla SPI protokolü başlatıldı. Projenin loop fonksiyonu içinde 1 saniye aralıklarla köle olan Arduino'ya ‘a' ve ‘b' karakterleri yollandı
char i = 0;
const int LED = 7;
/* LED Arduino'nun 7. pinine bağlanmıştır */
void setup()
{
pinMode(MISO, OUTPUT);
pinMode(SS , INPUT);
/* MISO pini OUTPUT, SS pini INPUT olarak ayarlandı */
pinMode(LED,OUTPUT);
/* LED pini çıkış olarak ayarlandı */
SPCR |= 0b11000000;
SPSR |= 0b00000000;
/* Slave mod ve interrupt için ayarlamalar yapıldı */
sei();
/* Interruptlar çalıştırıldı */
}
void loop()
{
delay(100);
}
/* SPI kesmesi olduğunda çalışacak fonksiyon */
ISR(SPI_STC_vect)
{
cli();
/* Interruptlar durdurulmuştur */
while(!digitalRead(SS))
{
SPDR = i;
i ++;
if ( i > 255)
i = 0;
while(!(SPSR & (1 << SPIF)));
/* SPI hattında veri aktarımı bitene kadar bekle */
char gelenVeri;
gelenVeri = SPDR;
if(gelenVeri == 'a'){
digitalWrite(LED,HIGH);
}else if(gelenVeri == 'b'){
digitalWrite(LED,LOW);
}
/* SPI üzerinden gelen verinin değerine göre LED'in konumu değiştirildi */
}
sei();
/* Interruptlar başlatılmıştır */
}
Bu uygulamayla SPI protokolünün nasıl çalıştığını ve Arduino tarafında hem master hem de köle konumunda hangi fonksiyonların kullanıldığını öğrendik. İlerleyen konularda SPI ile çalışan cihazları inceleyeceğiz.
Hiç yorum yok:
Yorum Gönder